In the world of industrial mechatronics, “vibes” don’t exist. If a pneumatic cylinder fires even a millisecond late, the line stops—or something breaks. Transitioning into a Senior Automation role, it became clear that the digital world is strangely tolerant of fragile solutions that only work “most of the time.” Real reliability, though, can’t depend on luck or manual refresh cycles; it has to be designed into the system from the start.
Hardening the Stack: Applying Mechatronic Principles to Digital Automation
1. The Principle of Idempotency

On a factory floor, sending a “Start” signal to a motor that is already running should never cause damage. The command must be safe, predictable, and reversible, no matter how many times it is sent. In digital automation, by contrast, redundant webhooks and duplicate sync jobs often create “ghost” records, race conditions, or inconsistent states across systems.
The architectures designed here enforce idempotent logic as a first-class concern, so the thousandth call is as safe and meaningful as the first. Robust automation should be boringly reliable in the face of repetition, not brittle and surprising when the inevitable retry happens.
2. From Direct Polling to Event-Driven Change Data Capture
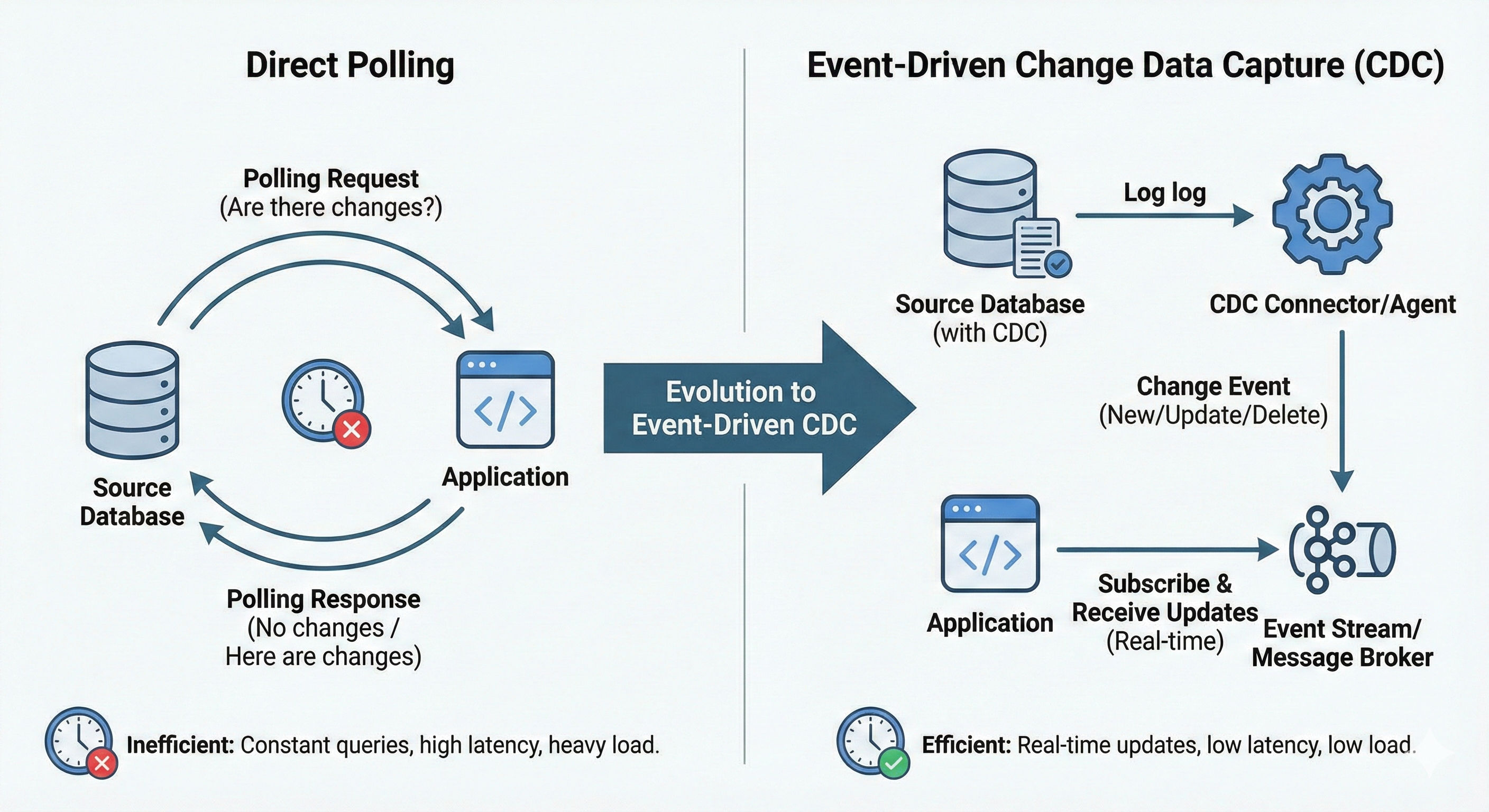
In traditional automation, naive PLC programs rely on polling—the CPU endlessly scanning inputs in sequence. When the scan time is 20 ms but a fast moving part trips a sensor for only 10 ms, that event simply disappears, and for precision systems, that kind of invisibility is unacceptable.
The same inefficiency shows up in digital workflows when an n8n flow polls a Postgres database every minute for new rows: users can sit for up to 59 seconds before anything happens, while 99% of executions quietly waste compute checking for data that is not there. These are silent failures, not because the code throws errors, but because the latency hides in the user experience, where it hurts the most.
To eliminate this, the CMS engine switches to Change Data Capture (CDC) using Supabase database webhooks—the digital equivalent of a hardware Interrupt Service Routine (ISR). Instead of the workflow constantly asking, “Is there new data?”, the database emits a signal the moment a change occurs and pushes the updated record straight into an n8n webhook, with each payload carrying a unique record ID so execution happens once—and only once.
This is not just optimization; it is an evolution—from systems that burn cycles checking for work to systems that react to reality in real time, combining hardware-level precision with the elasticity and reach of cloud native automation.
3. Engineering Industrial-Grade Stability
Stability is not a feature; it is the foundation. I approach every digital workflow and database with the same zero-fault tolerance used in industrial manufacturing. By proactively engineering away failure modes, I eliminate brittle "glue code" and temporary fixes. The goal is not just to connect apps, but to build a resilient architecture that scales indefinitely and requires zero maintenance.